

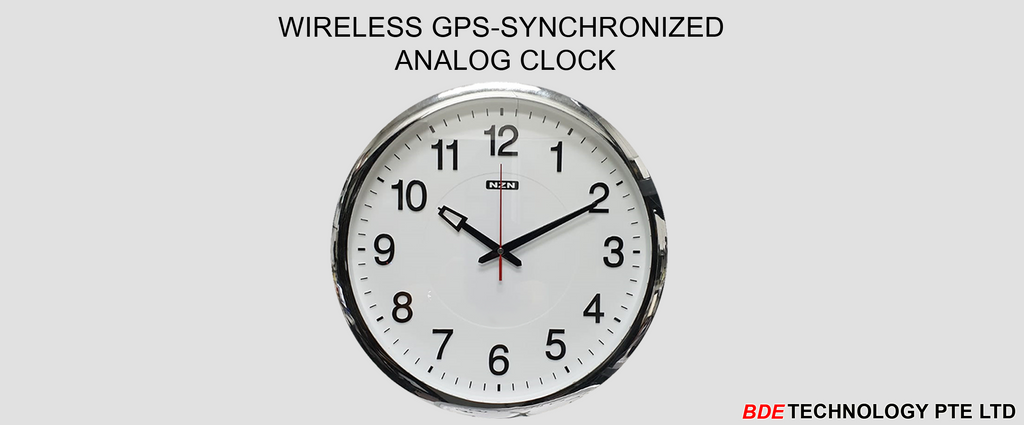
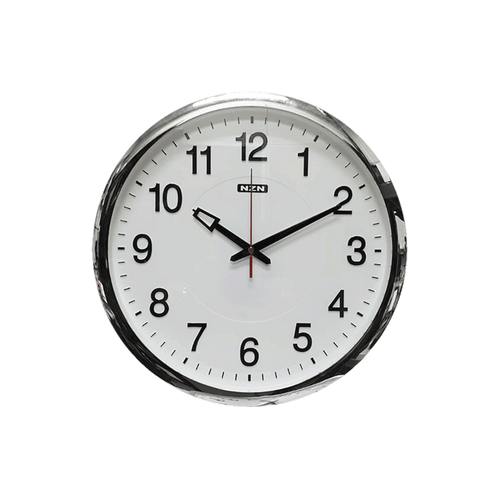
GPS-Synchronized Analog Clock System
**INSTALLATION, TESTING & COMMISSIONING INCLUSIVE**
Key Features:
GPS Synchronized for 100% Time Accuracy
Viewing Distance of 30m
Quick Correction for Time Change (Up to 5 Minutes)
Battery Operated (Optional AC Power Adaptor)
Specifications:
Place of Origin
Made in Taiwan. Assembled in Singapore
Dimensions
380(W) x 43(D) mm
Weight
1 kg.
Power
1pc 1.5 Alkaline C Sized Batteries Optional AC Power (AC-DC Adaptor)
Operating Temperature
32º - 120ºF
Humidity
0% - 95%, Non-Condensing
Frame and Lens
Silver Plated Resin Case, Clear Acrylic Panel
Viewing Distance
30m
Communication
WIRELESS RF 923MHZ
Synchronization
Every minute
Wireless Communication Range
1000m Approx. (No Blockage)
*Specifications are subject to change without notice
*Terms and conditions apply
**INSTALLATION, TESTING & COMMISSIONING INCLUSIVE** Key Features: GPS Synchronized for 100% Time Accuracy Viewing Distance of 30m Quick Correction for...
**INSTALLATION, TESTING & COMMISSIONING INCLUSIVE**
Key Features:
Protection index : IP53 / IK07
Viewing Distance of 60m
Poly methacrylate protective crystal (PMMA)
Dial markings: Arabic figures
Specifications:
Dimensions
660(W) x 166(D) mm
Weight
15.4 kg.
Operating Temperature
-20º - 80ºC
Viewing Distance
60m
Synchronization
Every minute
Movements
24V minute impulse, 24V second impulse, 1/2 minute serial impulse, AFNOR, DHF
*Specifications are subject to change without notice
*Terms and conditions apply
**INSTALLATION, TESTING & COMMISSIONING INCLUSIVE** Key Features: Protection index : IP53 / IK07 Viewing Distance of 60m Poly methacrylate protective...

**INSTALLATION, TESTING & COMMISSIONING INCLUSIVE**
Key Features:
Protection Index: IP54
Light grey lacquered aluminum casing
Safety glass crystal
Viewing Distance of 100m
Dial markings: Arabic figures
Specifications:
Dimensions
804(W) x 258(D) mm
Weight
0.8 kg.
Operating Temperature
-40º - 70ºC
Viewing Distance
100m
Synchronization
Every minute
Movements
24V minute impulse, 24V second impulse, 1/2 minute serial impulse, AFNOR
*Specifications are subject to change without notice
*Terms and conditions apply
**INSTALLATION, TESTING & COMMISSIONING INCLUSIVE** Key Features: Protection Index: IP54 Light grey lacquered aluminum casing Safety glass crystal Viewing Distance...
Analog Clock
Whether you’re looking for a way to tell the time at home, or you would like a way for your employees to tell the time without having to look at their phones, we can provide you with a wide range of analog clocks. We provide a number of different shapes and designs, all of which can be modified to meet the needs of your home or business. We understand that each individual has their own personal preferences. This is why we offer designs that will suit any preferences or home design.
We also offer a number of professional designs for the workplace. These designs are available in larger sizes so that the time can be seen throughout the workplace by all employees in the office. Not only do they help employees to keep track of time, but they can also add to the overall aesthetic of the room. This can work as a great way to engage with potential clients as well as add class and sophistication to the workplace.
Acquire Our Wireless GPS Synchronized Analog Clock
Discover the convenience of our innovative Wireless GPS-Synchronized analog clock offered by BDE Technology Pte Ltd. Tired of constantly adjusting your analog clocks to keep them in sync? Our solution streamlines your timekeeping effortlessly:
1. Unparalleled Accuracy
Bid farewell to manual clock adjustments and unreliable timekeeping. Our Wireless GPS-Synchronized analog clock leverages global positioning satellites to deliver impeccable time synchronization precision to your organization.
2. Effortless Installation
Installing our clock is a breeze. Simply place it in your desired location, and it will automatically synchronize with GPS signals, ensuring perfect alignment with the atomic clocks employed by GPS satellites.
3. Trustworthy Timekeeping
Equipped with an integrated quartz oscillator, our clock guarantees accuracy, even in areas with limited GPS signal reception. No matter the circumstances, you can always rely on dependable and precise timekeeping.
4. Versatility Across Various Applications
Our Wireless GPS-Synchronized analog clock serves as an exceptional solution for a wide range of settings, including business offices, schools, healthcare facilities, and more, demanding pinpoint timekeeping. It is versatile, durable, and seamlessly complements your existing design.
Ease of Shopping for Our Analog Clock Online
When you choose to buy our Wireless GPS-Synchronized analog clock online, you unlock a range of benefits:
- Shop conveniently from the comfort of your home or office, eliminating the need to visit a physical store.
- Easily compare the superior features of our clock with just a few clicks.
- Enjoy a hassle-free and punctual delivery right to your doorstep.
- Take advantage of our competitive pricing for these exceptional clocks.
Take advantage of our competitive pricing for these exceptional clocks.
There are numerous compelling reasons that set BDE Technology apart as the preferred choice:
- Unmatched Precision
- Effortless Installation
- Reliability
- Versatile Applications
- Environmentally Friendly Option
Contact our team today and find out more about the various clocks that we have to offer. All can be provided and installed at the location of your choice.